موتور پلهای یا استپرموتور (stepper motor) یک موتور DC سنکرون بدون جاروبک است. از این موتور در صنایع مختلفی استفاده میشود که از جمله آنها میتوان به صنعت رباتیک اشاره کرد؛ اما استپرموتور چیست و ساختار آن چگونه است؟ در این متن قصد داریم به همین پرسش پاسخ دهیم.
پیش از هر چیز باید گفت که استپرموتورها نوعی دستگاه ورودی – خروجی دیجیتال هستند که امکان راهاندازی و توقف دقیق اجزای مختلف را فراهم میکنند. در این محصولات جریان عبوری از موتور به یک سری سیمپیچ فازی برخورد میکند که میتوانند پشتسرهم روشن و خاموش شوند. این ویژگی به موتور اجازه میدهد تا تنها به میزان دلخواه چرخش داشته باشد (برای مثال نیم چرخش).
موتور پلهای یک چرخش کامل را به چرخشهای بسیار کوچکتر (اما برابر) تقسیم میکند. از این چرخشها میتوان برای دستوردادن به موتور پلهای جهت حرکت در درجات یا زوایای چرخشی خاصی، استفاده کرد. بهطورکلی از یک موتور پلهای میتوان برای انتقال حرکات دقیق به قطعات مکانیکی ظریفی استفاده کرد که بهدقت بسیار بالایی نیاز دارند.
استپرموتورها عمر بالایی دارند.
اصل کار موتور پلهای
سؤال اصلی این است که فرق بین برسهای دی سی و استپرموتور چیست؟ یک موتور DC برس خورده با اعمال ولتاژ به ترمینالها کار میکند. این عمل به سیمپیچ اجازه میدهد تا با سرعت بالایی در یک محفظه آهنربایی ثابت (استاتور) بچرخد؛ اما روتور در این پیکربندی به یک آهنربای الکتریکی تبدیل میشود و بر اساس نظریه جاذبه و دافعه مغناطیسی بهسرعت در هسته موتور میچرخد.
برسها (کنتاکتهای الکتریکی) و یک کموتاتور (یک کلید الکتریکی دوار) با هم کار میکنند تا بهراحتی جهت جریان عبوری از سیمپیچ را تنظیم کنند. تا زمانی که ولتاژ کافی به این مجموعه انتقال داده شود، سیمپیچ روتور بهصورت یکطرفه و پیوسته میچرخد.
این امر کنترل نقطه توقف دقیق موتور را دشوار میکند و آن را برای کاربردهایی که بهدقت بیشتری نیاز دارند، به یک گزینه نامناسب تبدیل خواهد کرد. تنظیم دستی جریان نیرو به سمت موتور، دقت لازم برای انجام حرکات دقیق را فراهم نمیآورد؛ به همین دلیل در چنین شرایطی باید از استپرموتور کمک گرفت.
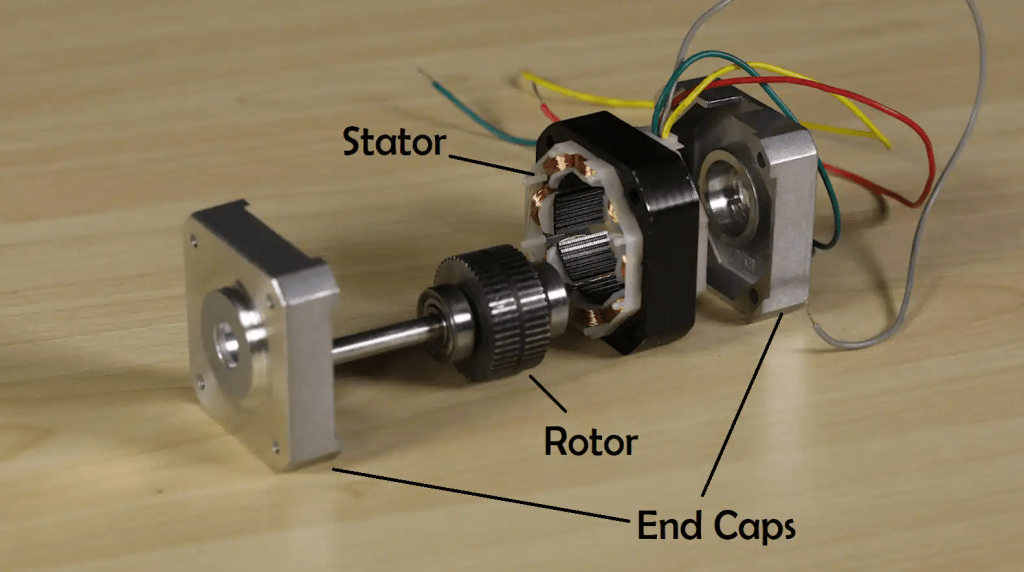
ساختار داخلی استپرموتور
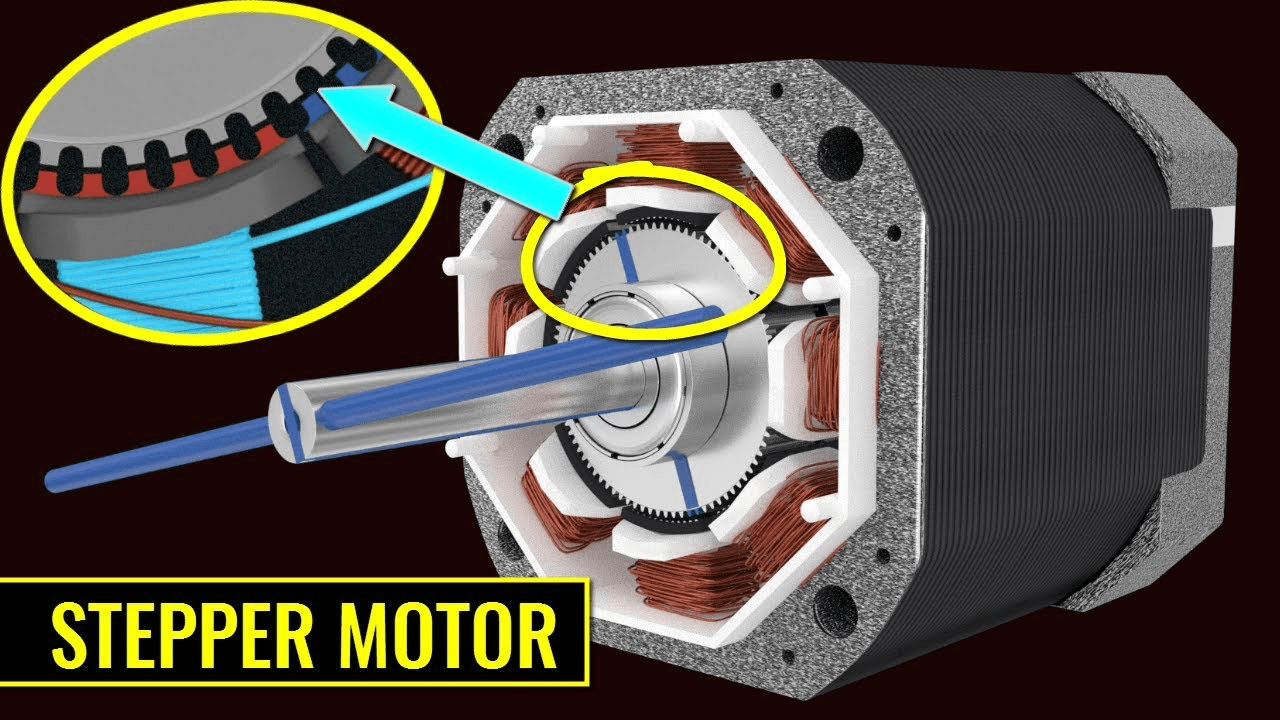
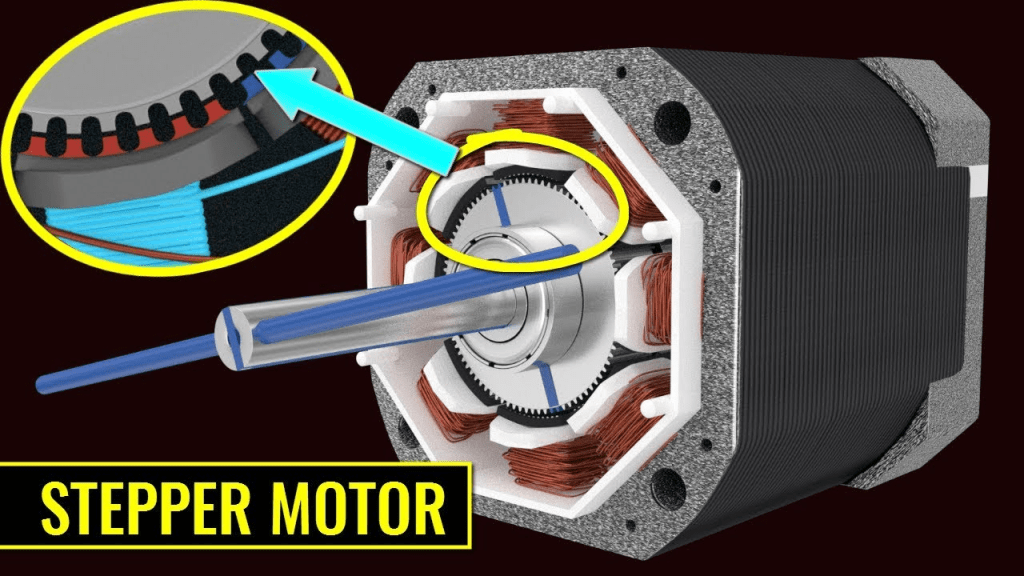
پیکربندی موتور پلهای بسیار متفاوت است. موتورهایی که در این دسته قرار می گیرند با یک محفظه سیم ثابت (استاتور) تولید میشوند که در اطراف مجموعهای از آهنرباهای الکترومغناطیس دندانهدار قرار میگیرند. یک جریان الکتریکی توسط استپرموتور به حرکات دقیق یکمرحلهای (single level moves) تبدیل میشود. در این صورت میخواهیم بدانیم روتور استپرموتور چیست و چه فعالیتی میکند؟
روتور توسط هر یک از این پالسهای موتور پلهای میچرخد. بخش دوار میتواند در صورت نیاز چرخشهای کامل یا جزئی را انجام دهد؛ زیرا جریان بین سیمپیچهایی که در اطراف موتور چیده شدهاند، تغییر میکند. البته میتوان آن جریان را به طور ناگهانی در هر یک از مراحل چرخش متوقف کرد.
مزیت واقعی یک موتور پلهای نسبت به یک موتور برسدار DC استاندارد این است که میتواند بهراحتی خود را در یک مکان یا فاصله مشخص و قابل تکرار قرار دهد و سپس آن موقعیت را تا زمانی که لازم است، حفظ کند. این باعث میشود که موتورهای پلهای برای کاربردهایی بادقت بالا مانند روباتیک مناسب باشند.
انواع موتور پلهای
انواع مختلفی از موتورهای پلهای موجود است و یادگیری اینکه هرکدام چه کاری انجام میدهند به شما کمک میکند تعیین کنید کدام یک برای کاربرد شما بهتر است. در این بخش بهصورت مختصر در مورد دو مدل اصلی استپرموتور صحبت میکنیم. اولین پرسش در این زمینه آن است که معنای دوقطبی بودن استپرموتور چیست؟
1. موتور پلهای دوقطبی
یک موتور پلهای دوقطبی دارای درایور داخلی است که با استفاده از مدار پل H، جریان را در فازها معکوس میکند. همه سیمپیچها را میتوان برای چرخاندن موتور با انرژیدادن به فازها، درحالیکه قطبیت معکوس شده است، به کار انداخت. این عمل تضمین میکند که سیمپیچهای موتور پلهای دوقطبی بیشتر از یک موتور پلهای تکقطبی معمولی کار میکنند و به موتورهای پلهای دوقطبی قدرت چرخش بیشتری را میدهد.
درحالیکه قدرت موتورهای پلهای دوقطبی از نظر تئوری نیز بیشتر است، آنها معمولاً با یک تراشه درایور داخلی عرضه میشوند که اکثر دستورالعملها و رفتارهای لازم را کنترل میکند. ازآنجاییکه موتورهای پلهای تکقطبی برای انجام عملکردهای مختلف نیازی به تغییر جریان ندارند، معمولاً از قیمت بالایی برخوردار هستند.
استپرموتورها کاملاً قابلکنترل هستند.
2. موتور پلهای هیبریدی
موتورهای پلهای هیبریدی به دلیل تکنیکهای نیمپلهای و میکرواستپینگ دقت بسیار بیشتری دارند. Microstepping شامل برنامهریزی یک درایور برای دادن شکل موج سینوسی یا کسینوس متناوب به سیمپیچها جهت به حداکثر رساندن تعداد مراحل تنظیم شده در یک موتور است. در صورت تحقق این امر، موتورهای پلهای نیز بهگونهای تنظیم میشوند که سریعتر و قابلاطمینانتر از پیکربندی معمولی کار کنند.
در موتورهای پلهای هیبریدی قطبها یا دندانهها معمولاً روی دو کاپ (cup) جداگانه در امتداد لبه روتور آهنربایی قرار میگیرند. این باعث میشود کنترل دقیقتر فازها، چرخشها و همچنین عملکرد آرامتر موتور پلهای امکانپذیر شود. در بخش بعد به این پرسش پاسخ میدهیم که بهراستی کاربردهای استپرموتور چیست؟
از استپرموتورها در دوربینها نیز استفاده میشود.
موتورهای پلهای در تعدادی از صنایع و رشتهها مورداستفاده قرار میگیرند که از معروفترین آنها میتوان به موارد زیر اشاره کرد:
کاربردهای موتور پلهای
- رباتیک
- دوربینها
- اسکنرها و چاپگرها، از جمله چاپگرهای سهبعدی
- اتوماسیون سیستمها و تجهیزات بستهبندی
- قراردادن مرحله پایلوت شیر برای سیستمهای کنترل سیال
در صنایع امروزی معمولاً از چندین استپرموتور بهصورت همزمان استفاده میشود تا در صورت وقوع هرگونه اختلالی در استپرموتور اصلی، استپرموتور جایگزین فعالیت خود را آغاز کند. این فعالیت نهتنها موجب کاهش اختلالات در روند کار محصول مدنظر میشود، بلکه میتواند مصرف انرژي را تا حد زیادی کاهش دهد.
استپرموتورها انواع مختلفی دارند.
سخن پایانی
موتورهای پلهای محصولی همهکاره، قابلاعتماد، مقرونبهصرفه و دقیق برای کنترل حرکات هستند و کاربر را قادر میسازند تا کارایی حرکت برنامهریزیشده را افزایش دهد. این امر، آنها را به یک کالای پرکاربرد در دسته تجهیزات اتوماسیون و ابزارهای کنترل (control equipment) تبدیل کرده است.
پیش از خرید این نوع موتورها باید موارد مختلفی همچون اندازه استپرموتور، نرخ گشتاور، سبک طراحی و … را در نظر بگیرید. سعی کردیم به این پرسش که استپرموتور چیست و چه کاربردی دارد، پاسخ دهیم. اگر نسبت به خرید و یا تعمیر موتورهای پلهای نیازمند کسب اطلاعات بیشتری هستید، میتوانید با کارشناسان ما تماس برقرار کنید.
{kind=link}
بدون دیدگاه